基于直线交点的少量末影之眼计算要塞坐标方案
说明:
本文内容层于2018年6月发布于MCBBS,并被设为推荐,但因为时间久远而不再可见,因此全文挪到博客中了。毕竟刚高考完就写的,也不是什么高级方法,看看就好。
使用地址:网页使用,C++源码见本文
一、前言
Minecraft中生存模式且非作弊的条件下,主世界要塞是通往末地并击杀末影龙的唯一途径,且其内部有丰富的宝藏。这意味着要塞在Minecraft玩家梦寐以求之地。而Minecraft的道具末影之眼会为我们指向最近的要塞方向,这位我们寻找要塞提供了极大的便利。但是每次抛出的末影之眼都有1/6概率遭到破坏。而事实上,寻找要塞的只需两个末影之眼表明方向即可。当然,多抛几次有利于减小误差。这类教程可能之前已经有坛友发过,而这次会将这个方法讲得更细致,这里将简要地探讨利用两次(或更多)末影之眼方向的数据来直接定位要塞坐标的方法。
二、基本原理
1. 坐标
在数字上反映了玩家在主世界中的位置。坐标基于一个由三条交于一点(即原点)的坐标轴而形成的网格。玩家会出生在距离原点数百方块的位置上。x轴反映了玩家距离原点在东(+)西(-)方向上的距离;z轴反映了玩家距离原点在南(+)北(-)方向上的距离。(粘贴自wiki,CC BY-NC-SA 3.0)。
2.调试屏幕
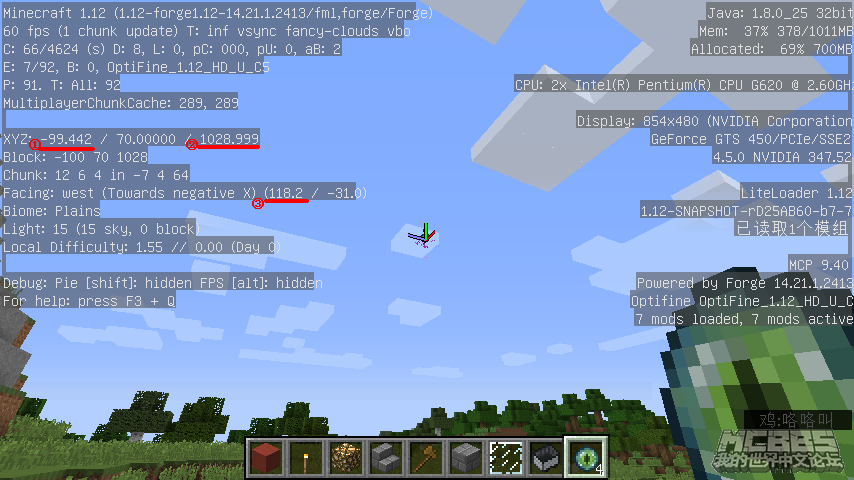
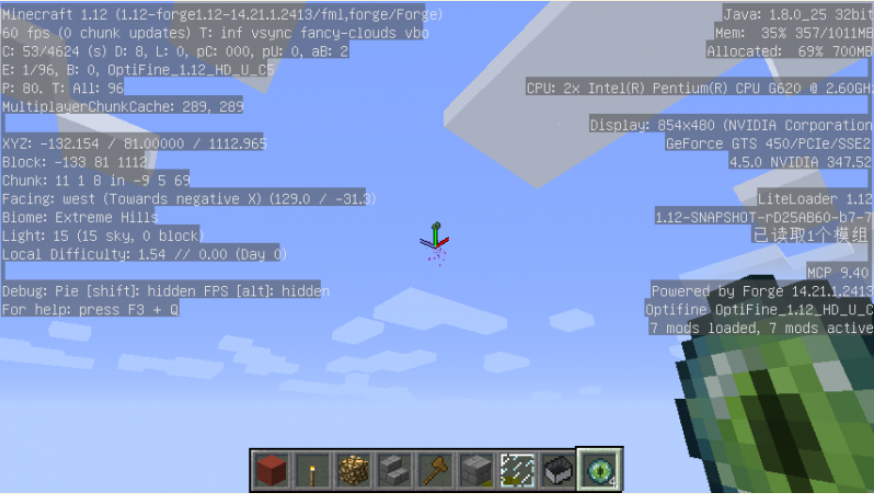
F3键呼出,显示区块缓存、内存使用、各种参数、玩家的当前坐标和当前游戏帧率图表(粘贴自wiki)。在“两点”法寻找要塞的过程中,我们需要关注调试屏幕中的三个数据:X坐标①Z坐标②与当前朝向(Facing)中的一个参数③。如下图所示:
3.平面上两条非平行线交于一点
这是一个很直观的结论,事实上这是平行线定义的逆否命题。
三、理论计算(两次末影之眼)
在Minecraft中,x轴的正方向为正东方向,z轴的正方向为正南方向,而第二版块中③所表示的值(-180.0~180.0)表示一个角度,其以z轴正方向为始边,顺时针方向为正方向。基于以上原理,两次末影之眼确定要塞的原理大致如下图所示:
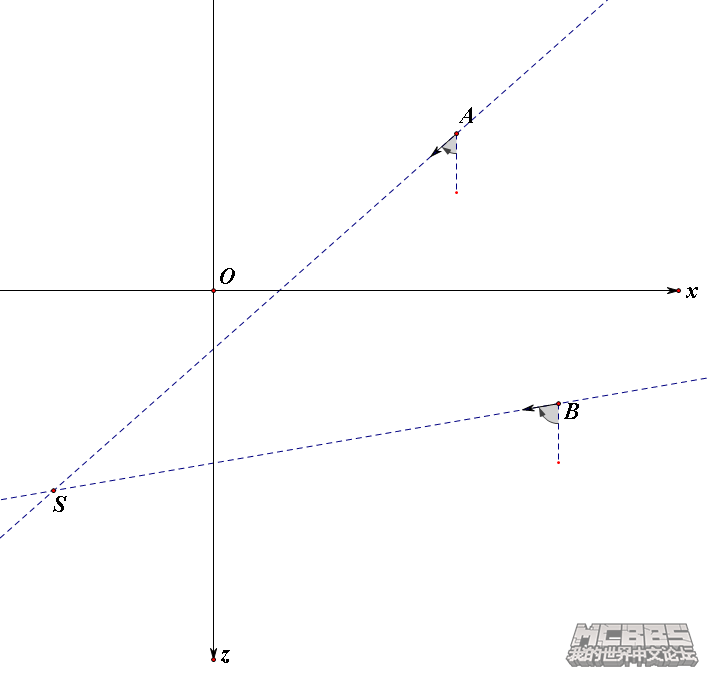
其中,A点与B点为末影之眼的抛出点,它们共同指向要塞S点。我们不难发现,如果这两条直线不平行,那么我们可以确定要塞的准确位置。下面,我们将来推导这一个要塞的坐标公式:(作者2021.04.12注:3年前写的,懒得用latex再打一遍公式了)
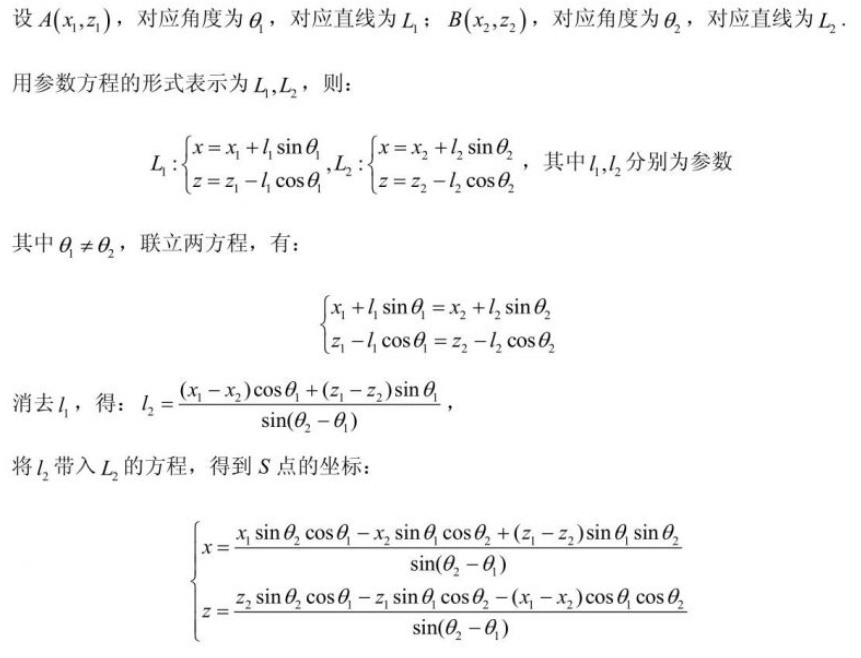
于是,S点的坐标得以导出,第二版块中的①,②,③分别对应式中的$x$,$z$,$θ$。
四、一个小验证
因为种种原因,验证的图片我实在是找不到了,但可以简单地阐述一下验证步骤与结果:
步骤:
1.在某一点抛出末影之眼,准星指向末影之眼悬停处,记录第二版块中的①②③三项数据;
2.以与1中方向接近90°的锐角方向行走约120米,再重复步骤1;
3.带入第三板块中的计算式,求得要塞坐标;
4.tp至理论坐标,以旁观者模式观测地下构造。
结果:
发现要塞结构(新版本的末影之眼不再指向末地传送门,而是指向要塞结构)位于距脚下5m左右(水平距离)。
(作者2021.04.12注:末影之眼指向要塞的起始楼梯位置)
五、从两个末影之眼到多个末影之眼
从第四版块的验证中我们不难发现,我们的算法基本正确,但仍有些许误差。事实上,由于在调试屏幕中表示朝向的角度只保留了1位小数,而要塞的距离一般距离玩家较远使得角度之差较小(一般都只有8°左右),因此导致的误差可能不小。我们可以用多抛几次末影之眼的方法来进行修正。
修正算法:
1.在多处不同的地点抛出末影之眼(注意确保这些末影之眼指向同一个要塞),记录对应数据,如记录了n组数据;
2.若这n条直线两两相交,则一共有n(n+1)/2个交点;
3.求出覆盖这n(n+1)/2个点的最小圆圆心,以此圆心作为要塞的基准点,而此圆的半径可用于衡量误差。
最小覆盖圆算法: 这个博客已经较为清楚的阐明,此处不再赘述(链接链至CSDN博客)
六、C++源代码
作者2021.04.12注:这是C++版本的代码,现已有JS版本可直接在网页使用,由@lintx移植。
1 |
|
七、基于程序的操作验证(图文)
首先,我抛出了4个末影之眼,记录的数据分别如下:



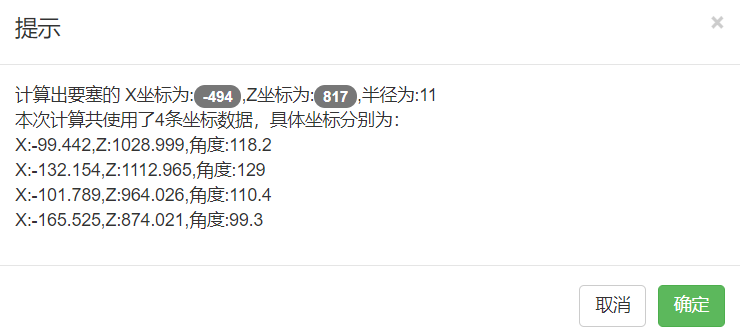
接下来,把这4个数据输入我们的程序(为方便起见,这里已经改为使用文件输入,输入的顺序可能与图片顺序略有不同),输出结果如下:
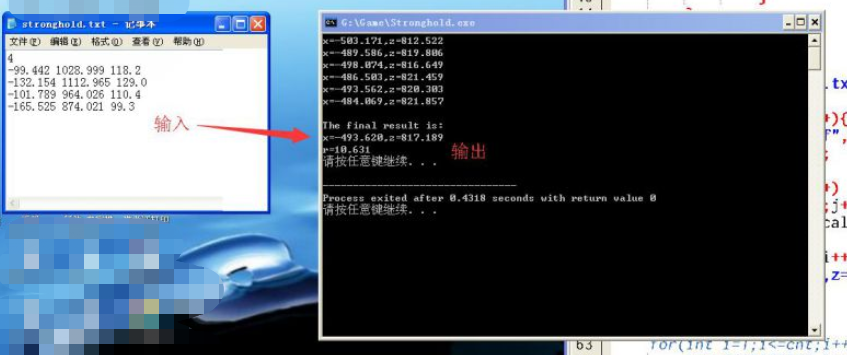
输出结果中,前6行表示这四条直线两两相交所形成的6个交点的坐标,最后的x,z,r代表着这6个点最小覆盖圆的坐标以及半径。
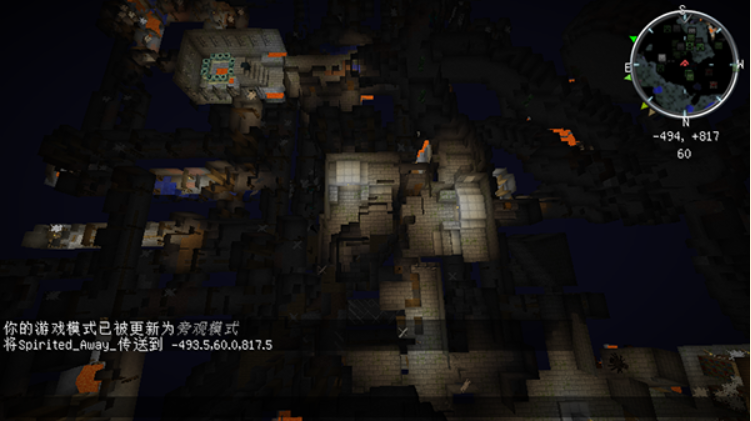
从输出结果来看,最小覆盖圆的半径只有约10m,当然在我们所理想的误差范围内,下面我们tp至目标点(也就是最小覆盖圆的圆心,x=-494,z=817)进行验证,发现正下方即是要塞,如下图:
八、误差分析
以下操作可能导致严重的误差,请务必避免:
- 抛出的末影之眼中可能存在两个或更多指向不同要塞。这在程序中的表现为最小覆盖圆的半径可能很大,保证不同末影之眼的抛出点相距不太远即可;
- 抛出的末影之眼中可能存在两个或更多指向角度相同或极其接近。解决方法见下文的第一点。
以下操作有助于减小误差,由于角度数据中,调试屏幕只保留了一位小数,而最大的误差往往来自于角度之差,因此要使角度之差尽量的大:
- 抛出一个末影之眼后,与其方向呈接近90度的一个锐角前进,在前进相同距离的情况下大体上可保证角度最大;
- 前进的距离可大致控制在80~180格,太小可能使角度差值不大,太大可能导致末影之眼指向不同的要塞;
- 多抛几个末影之眼,建议抛(不同位置)3~4个,由此定位的误差相对较小。 到达理论点后: 因为这只是一个大致位置,要塞可能在该点附近而不在该点上。因此可以向下挖后再向旁边挖挖,或再重复一次前文操作。
九、补充
这是基于点角式直线的计算,我也写过一个两点式的,实测误差更大,有空再填坑。
基于直线交点的少量末影之眼计算要塞坐标方案